







Happymodel
Happymodel ELRS F4 2G4 V3.1 V3.3 AIO 5in1
Couldn't load pickup availability
Happymodel ELRSF4 2G4 V3.1 V3.3 AIO 5in1 Flight controller built-in SPI 2.4GHz ELRS RX
V3.1 and V3.3 Version Update log:
V3.1 version comes with ICM20689 gyro and V3.3 version comes with BMI270 or ICM42688P gyro due to MPU6000 was discontinued
Onboard VTX changed to OPENVTX support 0mw~400mw
Pre-install Betaflight firmware which support ELRS V2.0 TX firmware
Firmware, hex file and default diff download
http://www.happymodel.cn/index.php/2022/02/23/elrsf4-2g4-v3-1-flight-controller-firmware-and-default-factory-diff/
The world’s first AIO 5in1 F4 flight controller with integrated SPI 2.4GHz ExpressLRS receiver has been launched. The flight controller integrates SPI controlled 2.4GHz ExpressLRS receiver, Dshot protocol 4-in-1 ESC, 5.8GHz 40ch video transmitter and Betaflight OSD. Ultra-small size and ultra-stable remote control range can improve the range of the original SPI receiver. And because the 2.4GHz ExpressLRS receiver is equipped with the SX1280 radio frequency chip with high sensitivity, high packet rate and low latency, this flight controller is the one that all Race/Freestyle pilots needed. It is suitable for use in Tiny whoop Race or Toothpick Freestyle, and can also be used in 1S ultra-lightweight Nano Long Range platform.
Good News: Quicksilver firmware already support this AIO flight controller since v0.6.2-dev version
Online configurator here
Notes: Due to the high-power VTX onboard, the temperature of the AIO flight controller will be relatively high in the standby state, and the camera signal may be lost after a couple of minutes standby. This is a normal phenomenon, please don’t worry. We strongly recommend using a fan to cool down when setting up the flight control. Please make sure the vtx antenna was plugged before power for the AIO flight controller.
Specifications:
| Flight controller | MCU:STM32F411CEU6 (100MHZ, 512K FLASH) Gyro Sensor: Upgrade to ICM42688P or BMI270 Original whoop size compatible Power supply: 1S battery input (DC 2.9V-4.35V) Built-in 5A(each) Blheli_S 4in1 ESC Dshot600 ready Built-in Betaflight OSD(SPI Control) Built-in 5.8G Open VTX Built-in SPI ExpressLRS 2.4GHz receiver Built-in 5V 1A BEC Flight controller firmware target: CRAZYBEEF4SX1280 |
| Onboard 4in1 ESC | MCU upgraded to EFM8BB21 Power supply: 1S LiPo/LiPo HVCurrent: 5A continuous peak 6A (3 seconds) Support BLHeliSuite programmable Factory firmware: O_H_5_REV16_8.HEX Default protocol: DSHOT600 |
| Onboard SPI ExpressLRS 2.4GHz Receiver | Packet Rate option: 25Hz/50Hz/150Hz/250Hz/500Hz RF Frequency: 2.4GHzAntenna : SMD antenna Telemetry output Power: <12dBm Receiver protocol: SPI ExpressLRS Could bind with Happymodel ES24TX , ES24TX Lite, ES24TX Slim and DIY 2.4GHz ELRS TX module(Requires ELRS V2.0 firmware) |
| Onboard 5.8g VTX | Output power: 0mw~400mw switchable Frequency: 48CH Input voltage: 3.3V~5.5V Current consumption: 300mA(type) Frequency: 5.8GHz 6 bands 48 channels(include Race band) Smartaudio V2.1 ready |
| Onboard voltage and Amperage meters settings | Voltage meter scale setting 110 Amperage meter scale setting 1175 |
Bind procedure:
- Power the flight controller by connecting USB. Please make sure that the port driver of the flight controller is correctly installed on the computer, then open Betaflight Configurator(Recommend 10.8.0) to connect, enter to the “receiver” interface, and then click “Bind Receiver”, the red LED at the bottom of the flight controller will flash quickly, which means that the SPI ELRS receiver enters the bind mode. There is another way to make the receiver enter the bind mode: after connecting to the Betaflight configurator, move to the CLI interface and enter “bind_rx” in the command line.
- Make sure you already upgrade the elrs tx firmware to V2.0 version. After correctly connecting ELRS TX module to your radio transmitter, copy ELRSV2.LUA file to the SD card in the radio transmitter. The directory is “SD Card/Scripts/tools”, Then run ELRSV2.LUA, and then click “bind” to link with the SPI ExpressLRS receiver. The Red LED will blinking slowly, this means the bind is successfully.
- After binding successfully, please re-power for the radio radio transmitter and then the Red LED at the bottom of the flight controller will getting to be solid, and the telemetry could be received at the same time.
- The meaning of the LED status of the SPI receiver: the LED is getting to be solid, indicating that the bind is successful or the connection and communication is normal, the LED flashing quickly indicates that the receiver is in binding mode, and the LED flashing slowly indicates that the there is no signal received from the radio controller.
Old ELRSF4 2G4 V1.0 V2.0 Firmware and diff document download link
Latest ELRSF4 2G4 V3.1 Firmware and diff document download link
Onboard openvtx vtx table:
# vtxtable
vtxtable bands 6
vtxtable channels 8
vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 0 5885 5905 0 0
vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable band 6 LOWRACE L FACTORY 5333 5373 5413 5453 5493 5533 5573 5613
vtxtable powerlevels 5
vtxtable powervalues 10 2 14 20 26
vtxtable powerlabels 0 RCE 25 100 400
save
Notes: Since Betaflight has not yet released the official firmware that could supports the SPI Expresslrs protocol, the current version is the Beta version(Target:CrazybeeF4SX1280). Betaflight will update to their official target soon. Please feel free to contact with us if you have any issues with this Beta version Firmware.
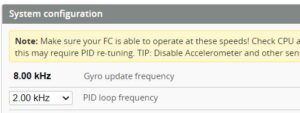
Please change the “PID loop frequency” to “2kHz” , sometimes it would make the SPI receiver not working correct while the value is “8kHz”
More details and discussion on Github
https://github.com/betaflight/betaflight/pull/10788
All parts are shipped fast from SYRACUSE, NEW YORK & some DROP SHIP ORDERS from San Diego, California. If there's an issue with something, please let us know and we will do our best make it right! SaltCtyRacingFPV, LLC dba "weBLEEDfpv.com" offers a (30) day return policy on all new unopened equipment, starting from the date the product(s) was delivered to the customer. Anything beyond (30) days of delivery will not be eligible for return. If the product(s) received have been opened, used or damaged, no return options will be offered. If the item is in brand new condition but requires to be repackaged, a (15%) restocking fee will be applied. The shipping cost for any unwanted product will not be refunded by SaltCtyRacingFPV "weBLEEDfpv.com" (It is recommended to choose a return shipping method with tracking).
**************************************************************************
Please email at SaltCtyRacingFPV@gmail.com to contact us and initiate a return. Please contact us first before sending anything back.
**************************************************************************
⚠️ FPV DIGITAL SYSTEM NOTICE
HDZero, Walksnail, VTX systems, and ultra-micro FPV electronics generate heat quickly while powered and require proper handling during setup and troubleshooting.
Bench setup without airflow/cooling can result in excessive heat buildup.
Once powered, configured, firmware updated, soldered, flown, or modified, products are considered used.
Manufacturer warranty may apply for BNF drones and electronic systems.
Lithium Ion Battery No Acceptance Policy
For our lithium ion battery products, all sales are final. This means:
- No Returns or Exchanges: Once your purchase is completed, we do not accept returns, exchanges, or cancellations.
- Customer Responsibility: Please review all product specifications and details carefully before making your purchase.
- Safety and Compliance: Due to safety standards and regulatory guidelines, we cannot process any post-sale modifications.
**************************************************************************
Thank you for your understanding.
Drop Us A Line
We’re happy to answer any questions you have or provide you with an estimate. Just send us a message in the form below with any questions you may have.






{kind=link}